
Robot April in TISTORY
로봇 경제학 (robot economics) 본문

로봇이 돈이 되는가?
의료분야와 국방분야의 기술을 제외하면, 아마도 대부분의 기술이 결국은 돈이 얼마나 되느냐가 가장 큰 관심사일 것이다. 로봇 분야만도 의료로봇과 군사용 로봇 등이 있으니, 예외가 없지는 않겠지만, 정부가 됐든, 기업이든, 개인이든 결국은 로봇분야에 자금을 투자하는 것은 로봇산업의 생태계를 구축하여, 그 안에서 돈이 돌게 만드는 것이 가장 큰 목적일 것이다. 그럼 과연 로봇으로 돈을 만들 수 있을까?
인간 대체 기술은 돈이 된다?
필자의 다른 글에서도 언급한 적이 있다시피, 기본적으로 로봇기술이 가진 정체성(identity)은 바로 “인간의 노동력을 대체하는 기술”이다. 즉, 인간의 기본 욕구 중 하나인 “힘든 노동으로부터의 해방”을 위해 인간이 만들 기술이 “로봇”이고, 200년 전이라면 “노예”라고 불렀을지도 모르겠다. 그런데 이 점 때문에, 거부감을 가진 기술 중에 로봇기술이 들어간다. 단순 노동력을 팔아 그 대가로 먹고사는 사람에게는 로봇이 자기 직업을 빼앗아 갈 수도 있기 때문이다. 이런 사람들의 거부감 때문에 로봇분야에서 함부로 무인화(unmanned, 無人化)라는 용어를 사용하지 않는다. 대신 순화된 용어인 자동화(automation, 自動化)라는 용어를 사용한다. 두 가지 단어에 대한 거부감은 극단적으로 다르지만, 결국은 둘 다 사람이 필요 없어지는 기술인 것은 마찬가지다. 무인화든 자동화든 이러한 인간 대체 기술은 분명히 수요가 있다고 생각한다. 다만 인간을 어느 정도까지 대체할 수 있는가가 문제일 뿐이다.
제품으로서의 로봇
한때 국내 대기업에서 로봇기술을 제품에 접목하는 팀에서 일한 적이 있었다. 기업은 이윤추구가 목적인 집단이므로, 당연히 제품으로서의 로봇의 사업성에 대해 아주 심도 있는 검토가 있었고, 결론은 그다지 긍정적이지 않았다. 당시 로봇 시장의 규모가 미미했던 이유보다는 좀 더 근본적인 한계가 발견되었기 때문이다.
1) 구매자의 기대치가 너무 높다.
로봇은 우리가 실제로 접하기 전부터, 소설이나 연극, 영화 등에 많이 등장하였다. 영화 속에서 상상으로 그려진 로봇은 현실에서 접할 수 있는 로봇의 기술 수준을 훨씬 뛰어넘는다. 이런 걸 모르는 고객은 현실에서 로봇을 제품으로 구매했을 때, 영화에서 보았던 로봇과는 다른 수준에 크게 실망할 가능성이 높다. 이래서는 많이 팔기 어렵다.
2) 생산 단가가 너무 높다.
현실에서 돈을 주고 살 수 있는 제품들은 제작에 많은 부품을 사용한다고 하더라도, 생산에 드는 비용과 부품 가격의 통제가 어느 정도 가능하다. 더구나 대량생산을 위한 공정이 비교적 복잡하지 않다.
혹자는 수만 개의 부품으로 이루어진 자동차가 있지 않냐고 하겠지만, 자동차도 따지고 보면, 원형 핸들을 돌리면, 굴러가는 바퀴를 조향(操向)해서 원하는 방향으로 이동하는 수레의 원리를 기반으로 하는 단순한(?) 제품이다. 극히 최근에서야 본래 로봇용으로 개발되었던, 자율주행 기능이 탑재되면서부터 로봇과 비슷한 수준의 센서가 장착된다든지, 스스로 목적지까지 경로를 만들어 기존의 자동차라는 하드웨어를 제어하는 소프트웨어가 탑재되는 수준까지 발전하고 있지만, 로봇 기술에 비하면 아주 기초적인 수준일 뿐이다.
로봇도 종류가 많으니 어떤 로봇을 기준으로 할지에 따라 크게 달라지겠지만, 평균적으로 기존의 제품들보다 로봇 제품은 부품의 조립과정이 복잡하고, 생산을 위해 필요한 전반적인 비용이 기존 제품보다는 훨씬 비쌀 것으로 예상할 수 있다. 특히 기존 제품 양산 기술자들과 이야기를 해보면, 로봇 제품 생산 공정 구축과 숙련자 훈련에 상당히 부정적인 것을 알 수 있다.
3) 사후관리 비용이 너무 많이 든다.
국내에서 흔히 말하는 영어 아닌 영어, 애프터서비스(A/S). 진짜 영어로는 warranty(품질보증) 혹은 customer service(고객서비스)라고 하는 판매 후 고객지원 서비스 비용도, 보통은 제품 가격에 포함되는데, 로봇은 이 비용이 너무 비싸서, 제품이 필요 이상 고가로 가격이 책정되거나, 그렇지 않으면, 팔면 팔수록 적자가 나는 제품이 될 수 있다.
지난 몇 년 동안 많지 않은 안내용 혹은 접객용 로봇들이 팔렸지만, 보통 1년 이상 계속 사용되는 사례를 찾기 힘들다. 다른 이유도 있겠지만, 가장 큰 이유는 사후관리 비용이 너무 비싸고, 지속적 업그레이드가 되지 않기 때문에 고객 입장에서 사용 가치가 시간이 지날 수록 급격하게 하락하기 때문이다.
로봇 제품화 사례
1) 일본 SONY, 로봇 Aibo(아이보)
일본 소니(SONY)는 20세기의 마지막 해였던, 1999년 5월 Aibo(아이보: 일본어로 “파트너”라는 의미)라는 로봇 강아지를 출시하여 가정용 로봇 제품으로 판매를 시작하였다. 당시로써는 파격적인 제품이었는데, 로봇 Aibo를 상품화하기 위해 SONY에서 가장 실력있는 엔지니어가 투입되어, 로봇 상품화를 위한 알려지지 않은 많은 기술개발도 함께 진행되었던 것으로 밝혀졌다. 당시 로봇 Aibo의 가격은 대당 1백만원대에서 3백만 원대까지 옵션에 따라 다양했다.

잘 알려지지 않았지만, 로봇 Aibo의 모든 관절은 쉽게 분해조립 및 교체를 할 수 있도록 개발되어, 앞에서 지적한 제품 양산 문제와 사후관리 문제를 동시에 해결하려고 했다. 이를 위해 개발된 것이 “Open-R bus”라는 9핀 커넥터와 실시간 장치 인식이 가능한 프로토콜 및 통신용 호스트 컨트롤러 반도체 칩 등이다. 당시에는 아직 USB도 보급되기 전이었기 때문에, 그때는 상당히 앞선 기술이었다. 더구나 SONY는 자사의 모든 전자제품에 사용하려고 개발했던 실시간 운영체제(real-time operating system), 아페리오스(AperiOS)를 로봇 Aibo에도 적용하여, 자사 표준화에 신경을 썼으며, 이를 통해 제품의 저가화 및 개발비 절감을 이루려고 했던 것 같다.
로봇 Aibo의 개발은 당시 CS(computer science) 연구소장이었던, Doi Toshitada(土井利忠) 박사에 의해 이루어졌으며, 본래 SONY와 Phillips가 공동으로 세계 최초로 개발했던 CD(compact disc) 개발에도 관여했던 핵심 엔지니어 출신이다.
로봇 Aibo는 2006년까지 계속 새로운 모델을 출시하면서, 약 8년간 상품으로써의 수명을 다하고, 현재는 미국 Robot Hall of Fame(인류 역사에 남을 로봇을 보관하고 전시하는 시설)에 들어가 과거의 영광으로 기억될 뿐이다. SONY는 로봇 Aibo가 단종된 2006년 이후에도 계속 제품 수리 및 소모품 교체 등을 지원하다가, 단종 7년째 되던 2013년 고객서비스도 종료하게 된다.
SONY社의 로봇 Aibo 최초 모델 동영상 => https://youtu.be/Zt8u-mTQioE
2) 일본 Softbank, 로봇 Pepper(페퍼)
한국에서는 성공한 재일교포 3세로 유명한 손 마사요시(한국에서는 주로 “손정의”로 부름)가 사장으로 있는 일본의 Softbank(소프트뱅크)에서는 2014년 6월, 안내 로봇을 상용화하여 현재도 판매 중이다. 가격은 대략 대당 1200만 원 정도이며, 일시불로 지불하는 경우는 없는 것 같고, 3년 할부로 주로 판매되는 것 같다. 실제 로봇 개발회사는 프랑스의 Aldebaran(알데바란)社인데, 2005년 7월, 프랑스 파리에 회사가 설립되었으나, 2012년 3월, 일본 Softbank가 지분 80%를 인수하면서, 자회사가 되었다. 현재는 Softbank Robotics(홈페이지: www.softbankrobotics.com)로 회사명이 변경됐다. 회사는 아직 프랑스 파리에 있으나, 2015년 이후부터 사장은 일본인이 하고 있다.
Aldebaran社도 자사의 로봇용 표준 개방형 실시간 운영체제(real-time OS)로 NAOqiOS(나오키OS)를 자체 개발하여 자사의 모든 로봇(NAO시리즈)에 탑재하였으며, 시뮬레이터까지 공급하기 때문에, 일반 개발자들이 편하게 로봇용 소프트웨어를 개발할 수 있도록 하여, 자사 로봇 제품의 지속적 업그레이드 문제를 해결하고 있다. 개발용 프로그래밍 언어는 C, C++, Python, Java 등이며, TTS(음성합성기)는 일본 Yoshimoto Robotics 연구소(홈페이지: www.yoshimoto.co.jp)에서 개발한 “AITalk”라고 한다. 로봇 Pepper용 소프트웨어 개발도구와 튜토리얼 그리고 샘플 소스코드 등은 Softbank Robotics 홈페이지에서 다운로드할 수 있으며, 현재 Linux, Windows, Mac 용 소프트웨어 개발도구를 제공하고 있다.
로봇 Pepper의 키는 어린이에게도 위협적이지 않은 120cm 정도이며, 폭은 휠체어(폭: 55~65cm)보다 좁은 50cm 정도, 몸무게는 성인이 들어서 옮길 수 있는 정도의 무게인, 29kg이라고 한다. 로봇이 설치된 매장에서 하루 종일 사용할 수 있도록, 최대 12시간 충전 없이 연속 사용할 수 있다. CPU는 미국 Intel 제품을, 가슴에 달린 디스플레이는 한국 LG전자 제품을, 공간 인식을 위한 3D 센서는 대만 ASUS 제품이라고 한다.
2017년, 일본에서 주관한 국제 로보컵 소셜로봇 부문에서 우승한, 한국의 서울대학교 컴퓨터공학부 장병탁 교수팀도 자신들이 개발한 인공지능 기술을 로봇 Pepper에 탑재하는 데 아무 문제가 없었던 것 같다.
2019년 8월부터는 주문자 예약 방식으로, 로봇 Pepper for Home 제품을 일반 개인도 구매할 수 있다.
Softbank Robotics, 로봇 Pepper 동영상 => youtu.be/1xV7rdPbLkc
3) 가정용 청소 로봇
그나마 가장 성공한 로봇 제품으로 꼽히는 가정용 청소 로봇. 일반적으로 미국의 iRobot社가 처음 만들었다고 생각하지만, 사실은 스웨덴의 가전기기 제조업체, Electrolux(일렉트로룩스)社가 2001년 자율주행 방식의 청소로봇으로 출시한 Trilobite(트릴로바이트)가 세계 최초의 가정용 청소 로봇이다.
요즘 판매되는 가정용 청소 로봇에는 기본 탑재되어 있는, 카메라가 Trilobite에는 없음에도 자동 청소도 자동 충전도 가능했다. 필자도 Trilobite를 실제 본 적이 있는데, 직접 보고 상당히 감탄했던 기억이 난다. 가장 인상적인 부분은 Trilobite가 장애물 감지와 방의 구조를 파악하기 위한 지도(map)을 만들기 위해 사용되는 유일한 센서가 Electrolux에서 자체 개발한 초음파 센서였는데, 개발자들이 그 센서 개발을 위해 얼마나 많은 고민을 했을까 하는 것이 느껴졌기 때문이다.

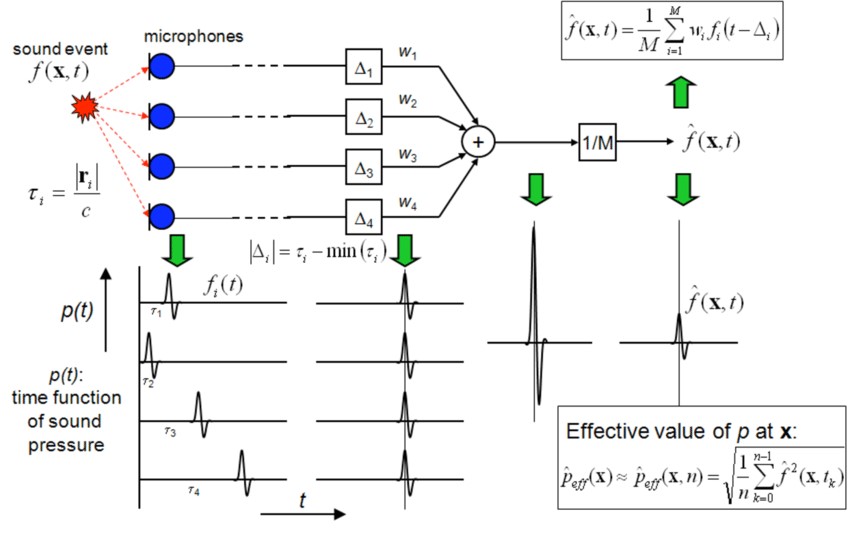
일단 원형 로봇의 절반 정도 영역을 덮고 있는 범퍼 전체가 초음파 발음(發音)부였는데 (위 사진의 은색 파인 부분), 이 구조를 쉽게 말하면, 반원형으로 구부러져 있는 스피커라고 상상하면 된다. 여러 개의 스피커를 반원형으로 배치한 것이 아니고, 그냥 반원 자체가 스피커였다. 그리고 그 반원형 발음부 주변, 위아래에 여러 개의 수음(受音)부 (일종의 마이크)를 배치하여, 코드화 된 발음부의 소리가 로봇 주변의 단단한 물체로부터 메아리쳐오면, 그 신호를 수음부에서 받아서, 주변 환경의 형태와 반사되어 오는 소리의 지연시간을 계산하여 거리와 방향을 파악하는 방식 (기술 용어로는 sound beamforming) 이었다. 박쥐가 빛이 없는 동굴 속에서도 벽에 충돌 없이 날아다니는 것과 같은 원리이다.
Trilobite는 자동 충전 기능도 있었는데, 당시 로봇의 움직임을 보고 추측한 것이지만, 로봇은 자신이 만든 지도 상에 충전기의 위치를 지정해 놓고, 일단 벽이 있는 곳으로 이동하여, 벽을 따라가면서 충전기로 접근해 가는 방식이었다. 아마도 초음파 센서만으로는 로봇이 정확히 자기 위치를 알기 어려워서 이런 꼼수를 사용한 것이 아닌가 추측된다.
Electrolux는 Trilobite 출시 당시 가격을 기존 수동 청소기의 2배 정도 가격으로 책정했다고 한다. 하지만 예상보다 많이 팔지는 못한 것 같다. 스웨덴 업체가 세계 최초로 가정용 청소 로봇을 출시한 뒤, 1년이 지난 시점(한국에서 월드컵이 열렸던, 2002년)에 미국의 iRobot(아이로봇)社는 Roomba(룸바)라는 아주 저렴한 청소 로봇을 출시하였고, 이 로봇 제품이 엄청난 인기를 얻게 되면서 비로소 청소 로봇이 대중화되기 시작한다.
Electrolux Trilobite 동영상 => youtu.be/V9u0f6jVxw0
4) 산업용 로봇
이미 산업용 로봇은 수십 년간 공장 자동화용으로 일정 수준의 시장을 형성하고 있다. 관련된 자세한 내용은 필자가 별도로 작성한 아래 내용을 참고하기 바란다.
전 세계 산업용 로봇 기업과 시장 점유율 => https://bhong.tistory.com/12
돈 되는 로봇을 위한 선결과제
결과부터 말하자면, 로봇이 대중화될 수 있는 인프라(infra)부터 만들어져야 로봇이 팔리고, 돈이 돌아가는 생태계가 만들어질 것이다. 자동차가 달릴 수 있는 도로가 있어야, 자동차가 팔리는 것과 같은 원리이다. 그럼 로봇에게 있어서, 자동차의 포장로와 같은 인프라는 뭘까? 아이러니하게도 그건 바로, 로봇용 고속 통신망과 로봇용 컴퓨터 클라우드가 바로 로봇 제품 대중화를 위한 인프라라고 할 수 있다.
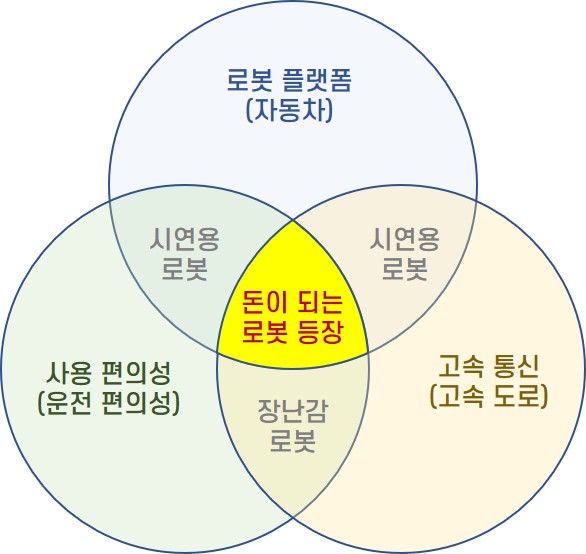
로봇용 고속 통신망은 로봇이 자기 위치를 정확히 알 수 있도록 하여, 자율적 작업수행을 할 수 있도록 해주고, 주변 IoT 기기와의 연동을 통해 인간을 대신하여 IoT 기기를 제어하는 심부름 등을 할 수 있게 될 것이다. 로봇용 컴퓨터 클라우드는 로봇의 인지능력을 거의 무한대로 향상 시켜 다양한 작업환경에서도 인간과 대등한 수준의 노동이 가능해지고, 클라우드로부터 공급되는 무한정의 콘텐츠를 활용하여 지속적인 가치창출이 가능하게 될 것이다. 로봇용 고속 통신망은 자동차의 포장도로 같은 역할을, 로봇용 컴퓨터 클라우드는 자동차의 운전자 역할을 한다고 이해하면 될 것 같다. 결국 로봇 제품의 대중화는 ICT(정보통신) 기술에 의존적이다.
혹자는 지금 개발하고 있는 각종 로봇 네비게이션 기술과 모션 플래닝 기술 및 지능화 기술로도 팔리는 로봇을 만들 수 있다고 생각할 수 있지만, 필자가 보기에는 그런 기술은 학교에서 하는 연구 대상은 되겠지만, 돈 받고 파는 제품에 적용할 수 있는 기술은 아닌 것 같다. 도시를 만들면 도로와 철로를 까는 등 교통 인프라부터 만든 후에, 자동차도 다니고 기차가 지나가는 것처럼, 로봇을 위한 ICT 인프라 없이는 대중화 가능한 로봇 제품은 세상에 나오기 힘들어 보인다.
'로봇(Robot)' 카테고리의 다른 글
| 중국 Lenovo, 독자개발 산업용 로봇 '신성(晨星:첸싱)' 발표 (0) | 2020.11.02 |
|---|---|
| 협동로봇의 대명사, 덴마크 Universal Robots (0) | 2020.07.14 |
| 김 서린 안경쓰고 달리기 (자율주행의 한계) (0) | 2020.07.07 |
| 중국 국영 로봇 제조업체, Siasun Robotics (新松机器人) (0) | 2020.07.03 |
| 만화에도 나오는 일본 로봇제어 기업, MUJIN (0) | 2020.06.25 |



